
Summary
Recent Projects
Medical Image Segmentation
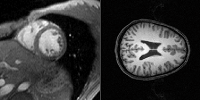 Medical image segmentation can be address as a nested multilabeling
problem. In our recent work, we showed that incorporating maximal
Hausdorff distance constraints provides us with useful image
segmentations.
Medical image segmentation can be address as a nested multilabeling
problem. In our recent work, we showed that incorporating maximal
Hausdorff distance constraints provides us with useful image
segmentations.
Image Segmentation
 The goal of image segmentation is to seperate the image into multiple
regions. In our recent work using superlabels, we showed that even binary
segmentation can be stated as a multi-label problem with a more accurate
result than the classical Boykov-Jolly approach.
The goal of image segmentation is to seperate the image into multiple
regions. In our recent work using superlabels, we showed that even binary
segmentation can be stated as a multi-label problem with a more accurate
result than the classical Boykov-Jolly approach.
3D Shape Matching
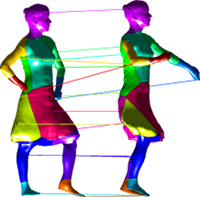 The goal of shape matching is to find a correspondence map between two
different shapes. For 3D shapes, there exists no polynomeous runtime
methods that solve this problem globally. In our recent work, we showed
that by solving an ILP (Integer Linear Program) instance, the 3D shape
matching approach can be formulated in a geometrical consistent manner.
The goal of shape matching is to find a correspondence map between two
different shapes. For 3D shapes, there exists no polynomeous runtime
methods that solve this problem globally. In our recent work, we showed
that by solving an ILP (Integer Linear Program) instance, the 3D shape
matching approach can be formulated in a geometrical consistent manner.
2D Shape Matching
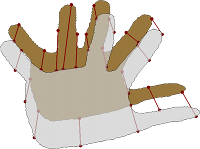 In the case of planar shapes, the matching can be computed quite
efficiently, e.g., by different almost quadratic runtime approaches. We
presented methods that can do this by either finding multiple shortest
paths in a planar grid or by computing a minimal graph cut within a planar
graph.
In the case of planar shapes, the matching can be computed quite
efficiently, e.g., by different almost quadratic runtime approaches. We
presented methods that can do this by either finding multiple shortest
paths in a planar grid or by computing a minimal graph cut within a planar
graph.
Shape Morphing
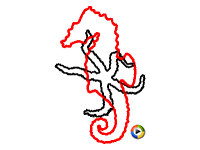 The set of all planar shapes can be described as a manifold in an infinite
dimensional vector space. By calculating the shortest distance between two
shapes (points on the manifold), we receive a transformation from one shape
into the other -- a so called morphing. We showed in our work that a
path-shortening approach can be much faster the previously used shooting
method.
The set of all planar shapes can be described as a manifold in an infinite
dimensional vector space. By calculating the shortest distance between two
shapes (points on the manifold), we receive a transformation from one shape
into the other -- a so called morphing. We showed in our work that a
path-shortening approach can be much faster the previously used shooting
method.